Vibe-coding a Rubik's Snake Simulator
It seems that browser-based simulations using three.js have become a kind of de-facto standard for exploring the capabilities of coding models to quickly "one-shot" prototypes and ideas.
Following an idea that i had in the back of my mind for quite a while now -- that the Rubik's Snake puzzle might be an interesting form factor for robotics -- I have started a to experiment with using coding LLMs to write simulation prototypes: on one hand, this allows me to get familiar with the configuration itself, one the other hand it lets me try out LLM-driven coding on a domain that I am somewhat, but not extremely knowledgable about.
Here are two different prototypes I built a few months apart:
- My initial attempt at using Perplexity and Copilot, which still took quite a bit of manual editing the core geometry to fix errors and inaccuracies. This allows twisting segments by clicking on the and rotating the model.
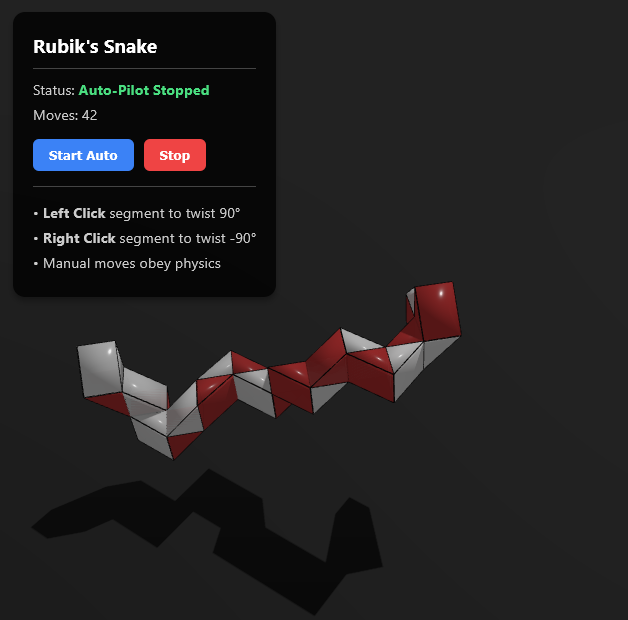
- The current version was rebuilt from scratch with Gemini 3 (completely through chat), including a few errors refinements. This version supports automatic random twisting as well as checking for "impossible" moves. I have then made a few more edits with Copilot to smooth out errors.
I have started tracking progress of this experiment on github. Eventually, I woud like to see the kinematics and control for a snake run in an environment like Asimov Gym, but as this is just a side project, I simply playing around a bit for now.
References
- thomas-wolter.de: many shape examples and a proposed notation for recording configurations. This page also has a browser-based 3D simulator.